
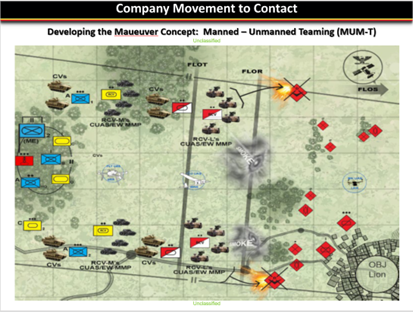
Software’s MUM-T Doctrinal Imperative
US Army training per the Maneuver Captain’s Career Course focuses intensively on how to generate company level maneuver including Assembly Areas, phase lines, targets, routes, breach points, etc. One aspect that is used to (theoretically) control a company’s movement was the FLOT or forward line of troops. Sixteen years later this concept has developed to account for our growing fleet of robots, autonomous platforms, and sensors. The modern Army maneuver concept envisions robust use of robots and sensors requiring the use of additional doctrinal control measures to regulate the employment of these modern technologies. No longer will the leading edge of the battlefield be characterized by the FLOT. Rather, it is the forward line of robots (FLOR) and forward line of sensors (FLOS) to make first contact exploiting the benefits of manned and unmanned teaming (MUM-T) on the modern battlefield.
 MUM-T is a military concept that involves integrating manned and unmanned systems to enhance the effectiveness of military operations. This concept can be applied in a variety of military scenarios, such as intelligence, surveillance, reconnaissance, and target acquisition. The use of forward line of sensors and robots in MUM-T can provide several advantages, including enhanced situational awareness, increased speed and agility, and reduced risk to human operators. For example, robots can be used to scout ahead of human troops and detect potential threats, while sensors can be used to gather real-time data on the battlefield.
MUM-T is a military concept that involves integrating manned and unmanned systems to enhance the effectiveness of military operations. This concept can be applied in a variety of military scenarios, such as intelligence, surveillance, reconnaissance, and target acquisition. The use of forward line of sensors and robots in MUM-T can provide several advantages, including enhanced situational awareness, increased speed and agility, and reduced risk to human operators. For example, robots can be used to scout ahead of human troops and detect potential threats, while sensors can be used to gather real-time data on the battlefield.
In terms of doctrine, the US Army has developed a Field Manual (FM) on MUM-T, which provides guidance on the integration of manned and unmanned systems in military operations. The manual covers topics such as planning and coordination, training and education, and the use of technology to support MUM-T. The U.S. Army Field Manual on MUM-T is FM 3-01.926, which is titled “Unmanned Aircraft Systems (UAS) Operations.” This manual provides guidance and procedures for integrating unmanned aircraft systems into Army operations, including MUM-T. The manual covers topics such as planning, coordination, training, and execution of UAS operations, as well as the roles and responsibilities of personnel involved in these operations. To be effective, MUM-T requires careful planning, coordination, and execution and is predicated upon robust communication networks and seamless integration of manned and unmanned systems.
The Blueforce software platform is uniquely suited to meet the manned and unmanned integration challenge. Manned and unmanned teaming will require software that is scalable both vertically from the tactical to the operational level of war as well as horizontally across various robots, sensors, and data streams. The software must be adaptable to the infantryman in the mud, squad leader in the Next Generation Squad Vehicle, company commander inside an Abrams tank and battalion commander or higher inside the tactical command post or operations center. The software needs to be interoperable with fielded hardware, software, AI/ML algorithms, and data repositories. It should also possess rapid discovery services that allow warfighters to subscribe to different robots and sensors in real time as the FLOT, FLOR, and FLOS ebb and flow. Lastly, the software needs to be standards based so that new technology can be integrated quickly and easily (extensible).
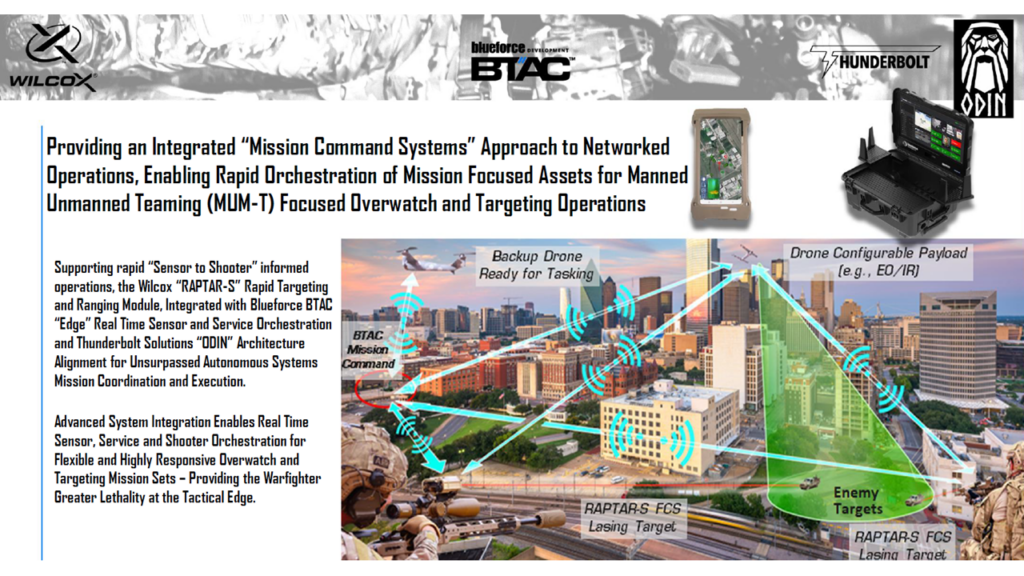
The Blueforce software ecosystem checks all these boxes. Here is one recent test case from Blueforce and our partners at Wilcox and Thunderbolt Solutions that demonstrates all of these capabilities which are available NOW:
Overall, MUM-T can provide significant advantages in military operations, but effective implementation requires modern software built to the demands of the modern battlefield. Blueforce is proud to offer scalable, adaptable, interoperable, and extensible software to meet this demand and ensure the seamless integration of manned and unmanned systems for our warfighters. To learn more, call us at +1-866-960-0204 or send an email to info@blueforcedev.com.
